Los avances tecnológicos en el campo de la biometría orientada a la identificación de personas han permitido que, hoy en día, exista un amplio repertorio de técnicas que permiten materializar este propósito, de manera increíblemente rápida, de una forma muy sencilla para el usuario, y con un elevado nivel de seguridad.
Tan amplio repertorio de técnicas se debe, en gran medida, al número de elementos presentes en el cuerpo humano que pueden ser utilizados para identificar inequívocamente a un individuo.
Estos elementos deben presentar una serie de características, las cuales tienen que ver con el hecho de que sean únicos en cada persona.
Dentro de estos elementos encontramos las manos, las cuales, además de contar con el que es el elemento biométrico más famoso hasta el momento, las huellas dactilares, cuentan también con otra característica que les va a permitir ser utilizadas dentro de este campo: su forma geométrica.
Las características de las manos en el ámbito de la biometría

La premisa que debe cumplir cualquier elemento corporal que pretenda ser utilizado en biometría orientada a la identificación, es la de poseer una serie de medidas y parámetros, cuyo conjunto suponga un grupo único e irrepetible en otra persona.
Las manos, elemento característico de los seres humanos y de los simios, se encuentra formada por 27 huesos los cuales se pueden agrupar en 3 categorías:
- Los pertenecientes al carpo, o zona más próxima a la muñeca.
- Los pertenecientes al metacarpo, que se corresponde con la zona de la palma.
- Los pertenecientes a los dedos, los cuales reciben el nombre de falanges. Cada dedo está compuesto por 3 falanges, excepto el pulgar, que solo tiene 2.
Estos huesos se encuentran conectados unos a otros mediante tendones, y se encuentran recubiertos por 19 músculos que, junto a la gran cantidad de articulaciones presentes en este elemento, le permiten efectuar una amplia variedad de movimientos.
La disposición de estos huesos y músculos en la mano da lugar a una serie de características que van a poder ser utilizadas en la biometría orientada a la identificación:
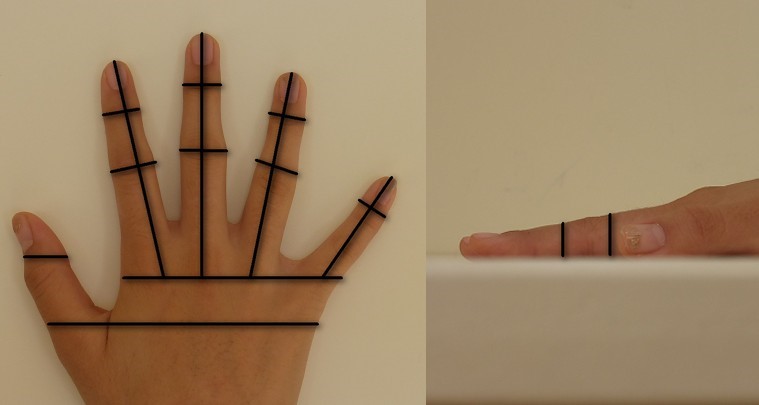
- Los dedos están formados por las falanges, en cuya unión se produce un ligero ensanchamiento de los mismos.
- En teoría, las articulaciones que forman las falanges en los dedos deberían estar alineadas formando en los mismos una línea recta. En la realidad no es así, ya que durante el crecimiento se producen pequeñas desviaciones que originan el desalineado de las mismas, variando en cada persona.
- El punto donde los dedos se unen a la palma de la mano se conoce como nudillo. La distancia de los nudillos a la muñeca (o final de la mano), así como la separación entre ellos va a ser otro dato que permitirá diferenciar entre las diferentes manos a reconocer.
Clasificación de las manos según su geometría

Atendiendo a las características geométricas de la mano, se puede establecer una clasificación de las mismas en 7 categorías, lo cual pone de manifiesto la gran variabilidad de este elemento corporal, ya que dentro de cada una de estas siete categorías se van a producir infinitas variaciones fruto de las diferentes medidas de cada uno de los puntos característicos:
Manos cuadradas

Es el tipo de mano considerado como normal, o término medio. Las proporciones de la palma y dedos guardan cierta armonía, siendo los dedos casi tan largos como la palma, y esta última algo ancha, de forma que el conjunto se podría incluir en un cuadrado.
Manos cónicas

En ellas la palma es ligeramente más corta que los dedos, de forma que presentan un aspecto algo alargado. Presentan unos nudillos bastante marcados.
Mano de palma grande

Debido a que cuentan con unos dedos cortos y gruesos, la palma, de notable anchura, va a ser el elemento dominante en las mismas.
Mano espatulada

Tienen la palma de forma cuadrada, con unos dedos planos y sin articulaciones marcadas.
Mano nudosa

Caracterizadas por presentar un pulgar corto y ancho, mientras que el resto de dedos cuentan con una longitud dentro de lo normal en relación con la palma. Las articulaciones de las falanges son muy visibles.
Mano puntiaguda

Tienen la forma de la palma ovalada, de mayor longitud que anchura, y los dedos son también bastante largos y huesudos, con las articulaciones bastante marcadas.
Mano mixta

Son un conjunto de diferentes características expuestas en las categorías anteriores.
Los dispositivos empleados en el reconocimiento geométrico de las manos

Los dispositivos empleados para realizar este tipo de reconocimiento biométrico cuentan con dos elementos principales:
- Una o dos cámaras.
- Una superficie donde apoyar la mano y que esta sea analizada.
Las cámaras
En los dispositivos que cuentan con una cámara, esta toma la imagen de la mano desde un plano situado encima de esta. Aquellos dispositivos que cuentan con dos cámaras, toman una imagen desde el plano superior, y otra desde un plano lateral; de esta forma se puede realizar una composición en 3 dimensiones de la misma y analizar una mayor cantidad de datos.
Otra opción con la que cuentan algunos dispositivos es la de equipar un espejo ubicado en la superficie inferior, formando un cierto ángulo y orientado hacia la mano, lo cual permite que con una sola cámara se puedan captar imágenes de dos planos diferentes de la mano, una superior y otra lateral.
Puesto que se trata de medir diferentes zonas de la mano, estas cámaras no requieren contar con grandes resoluciones o definición, siendo suficiente una cámara de calidad aceptable.
La superficie
La práctica totalidad de este tipo de dispositivos cuentan con una superficie plana, situada bajo la cámara principal.
En esta superficie aparecen unos pequeños cilindros (normalmente 6) dispuestos en forma vertical, de manera que sirven de guía a la hora de colocar la mano en esta superficie y, así, que siempre quede centrada y con misma posición de los dedos.

Lo habitual es que estas guías estén dispuestas para albergar la mano derecha del individuo a identificar.
¿Qué ocurriría si una persona carece de mano derecha? En estos casos, se puede utilizar el dispositivo colocando la mano izquierda, pero con la palma orientada hacia arriba, ya que de esta forma adquirirá la misma disposición que la mano derecha con la palma orientada hacia abajo.
Esta forma de uso resulta totalmente válida, ya que se trata de memorizar las medidas de determinadas zonas de la mano, indistintamente de cual sea su orientación, siendo obligatorio utilizar en los sucesivos procesos de identificación esta misma orientación.
Existen algunos modelos de dispositivo cuyas guías cuentan con sensores, de forma que, al producirse el contacto de la mano en todos ellos de la forma adecuada, la cámara entra en acción tomando la fotografía para analizarla.
Un aspecto simple, pero muy importante a tener en cuenta a la hora de idear una plataforma de apoyo para la mano, es el color de la misma. Este debe ser capaz de generar un contraste evidente con las manos de cualquier persona, desde las más blancas de piel, hasta las más oscuras. Colores muy claros podrán generar problemas con ciertos individuos de raza blanca, de igual forma que colores muy oscuros podrán generar problemas con ciertos individuos de raza negra.
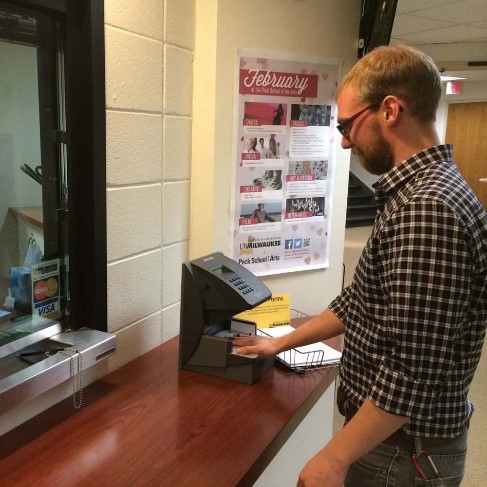
Estos dos elementos quedan integrados en un dispositivo de tamaño medio, aceptable para ser ubicado en entradas de acceso restringido, o ser integrados en un sistema de control de acceso mayor.
Funcionamiento de los dispositivos de reconocimiento de la geometría de la mano

Como es habitual en todos los dispositivos empleados en biometría, estos deben realizar una serie de fases en las cuales se obtienen los datos a analizar, se procesan esos datos para facilitar la extracción de la información, se extrae dicha información, se transforma a un formato de datos específico y, o bien es almacenado en la base de datos, o bien es comparado con otra serie de datos que se ha almacenado en un momento previo para producir la verificación de la identidad de la persona que está utilizando el dispositivo.
En general, las fases son las siguientes:
Captura y procesado de la imagen

El primer paso es tomar una fotografía del dorso de la mano una vez esta ha sido colocada en la superficie del dispositivo y ajustada a las guías.
Lo habitual es que la imagen tomada sea a color, por lo que el siguiente paso consiste en transformarla en una imagen en blanco y negro, y se aumentará notablemente su contraste con el objetivo de diferenciar claramente la silueta de la mano, de la superficie sobre la cual está apoyada.
A continuación, el sistema tratará de codificar la imagen en valores binarios, 0 para los elementos del fondo, y 1 para los elementos de la mano.
Una vez se ha convertido la imagen a valores binarios, con la aplicación de un algoritmo se extraen los bordes de la silueta de la mano, tanto en la vista que corresponde al dorso, como en la vista lateral si la hubiera.
Extracción de características
A partir de la imagen en la cual se han obtenido los bordes de la silueta de la mano, y de su dorso en caso de haber tomado también este plano, se realiza la medición de todas aquellas zonas que van a caracterizar la mano de la persona que posteriormente utilizará el dispositivo de identificación.
Cada compañía dedicada a la fabricación de este tipo de dispositivos incluirá unas zonas de la mano u otras, pero por lo general, estas características suelen comprender:
- Grosor: tomados desde la vista lateral. Se incluye el de la palma de la mano y el del dedo meñique, ya que la vista lateral suele tomarse desde este plano. Adicionalmente se puede incluir el grosor del dedo corazón, que será, del conjunto de dedos, el que más sobresalga en altura.
- Anchura: desde la vista del dorso de la mano, se toman las anchuras de las falanges de los dedos índice, corazón, anular y meñique. Dependiendo del fabricante, se pueden añadir medidas intermedias entre estas.
Se mide la anchura de la palma de la mano, y también la distancia entre el punto medio de unión de los dedos índice – corazón, con los puntos medios de unión de los dedos corazón – anular, y anular – meñique.
- Ángulos: una vez calculada la distancia entre los puntos medios de la unión de los dedos, se miden los ángulos que forman entre ellas, y también respecto a una línea horizontal imaginaria.
- Desviaciones de líneas: anteriormente se ha mencionado el hecho de que las falanges que forman los dedos no siguen una línea recta, como debería ser en la teoría, sino que sufren una ligera desviación.
Esta desviación es calculada para los dedos índice, corazón, anular y meñique.
Una vez se han obtenido todos los datos necesarios, el dispositivo almacena estas características en la base de datos, para luego poder ser utilizadas en las comparaciones realizadas al verificar la identidad de una persona.
Verificación de la identidad de una persona

El propósito de este tipo de dispositivos es el de corroborar que, efectivamente, la persona que desea obtener un determinado acceso tiene permiso para efectuarlo. Por ello, cuando dicha persona intente acceder, el sistema de verificación volverá a tomar una imagen de su mano y a realizar todo el proceso descrito hasta ahora en cuestión de segundos.
Una vez obtenidos nuevamente estos datos, serán comparados con la información correspondiente a todas las manos almacenadas en la base de datos hasta dar con aquella que coincida con la persona en cuestión. En caso de no dar con esta coincidencia, el sistema denegará el acceso.
Esta comparación de información se puede llevar a cabo de diversas formas, siendo las más frecuentes:
- Distancia euclídea: se trata de la distancia “física”, medida matemáticamente, de dos puntos en el espacio. En este caso se tratará de medir la distancia existente entre los pares de puntos que forman cada conjunto de las dos imágenes de la mano.
- Distancia de Hamming: como ocurre en el caso anterior, el conjunto de longitudes, ángulos y desviaciones de cada imagen forma un conjunto de datos que puede ser comparado con otro conjunto que contenga las mismas medidas.
La diferencia respecto a la distancia euclídea es que la distancia de Hamming no mide una distancia física, sino que cuantifica la diferencia entre dos conjuntos de datos en función de los elementos que son distintos y coincidentes.
Cuando cualquiera de estas dos medidas se encuentre dentro de los rangos establecidos por el fabricante al comparar los dos conjuntos de datos, el sistema verificará la identificación y le permitirá acceder al recinto o a la información solicitada.
Actualización de datos y medidas
Es habitual que una persona, a lo largo del tiempo, engorde o adelgace debido a diversos factores. Ante este hecho, algunos sistemas son capaces de ir actualizando en su base datos estos pequeños cambios que se van produciendo cada poco tiempo.
De esta forma, la información de la persona en la cual se tiene interés en identificar se mantiene actualizada y siempre es comparada respecto a unos datos tomados poco tiempo atrás.
Ventajas e inconvenientes del reconocimiento biométrico de la geometría de la mano

Tanto la metodología empleada en este tipo de reconocimiento, como la tecnología con la cual se confecciona estos dispositivos, van a hacer que el reconocimiento de la geometría de la mano cuente con una serie de ventajas respecto al resto de tipos de identificación biométrica; pero también aparecerán ciertas desventajas.
Ventajas
- Colocar la mano sobre un soporte para que se tome una fotografía es una acción en la que prácticamente nadie se siente amenazado, o percibe sensación alguna de que va a poder ser dañado. Gracias a esto, el reconocimiento biométrico de la geometría de la mano no genera rechazo en los usuarios.
- Resulta muy fácil de utilizar, ya que la presencia de las guías sobre la superficie en la que debe apoyarse la mano facilita el proceso de identificación.
- Es un proceso más rápido que otros tipos de reconocimiento biométrico.
- No requiere dotar al dispositivo de cámaras de gran resolución o definición, algo que repercute positivamente en el coste económico de este tipo de tecnología.
- Permite utilizar ambas manos, como se ha explicado, en caso de que una persona carezca de mano derecha.
Desventajas
- Únicamente es válida para ser utilizada en grupos de personas no muy extensos, debido a que las posibilidades de que los datos obtenidos de una persona se repitan en otra son más elevadas que en los casos de, por ejemplo, las huellas dactilares o el iris.
- Su utilización no resulta adecuada en niños.
- Su tasa de fiabilidad es elevada, pero menor que la de otros tipos de reconocimiento biométrico.
- Los dispositivos empleados cuentan con un cierto tamaño que puede ser un inconveniente a la hora de emplazarlos en determinados lugares.
- En casos de cambios bruscos de apariencia, como puede ser engordar (o adelgazar) una gran cantidad de kilos, la identificación podrá fallar. Suele ser un caso típico de personas que, en un momento dado fueron reconocidas por el dispositivo almacenando unos datos, sin producirse una identificación de la misma durante meses, lo que hubiera permitido ir actualizando los datos poco a poco durante ese proceso de cambio físico.
Usos del reconocimiento biométrico de la geometría de la mano

El hecho de que existan mayores posibilidades de que dos personas presenten un patrón muy parecido en las medidas de su mano, restringe el uso de este tipo de tecnología a ámbitos más reducidos, como las empresas.
Esta es la principal aplicación del reconocimiento biométrico de la geometría de la mano, así como controlar el acceso a edificios, comunidades de vecinos, garajes…
En el ámbito laboral también tiene aplicaciones, sirviendo para controlar el acceso y asistencia de los trabajadores, del mismo modo que en establecimientos como gimnasios o centros de actividades, que condicionan el uso y acceso a los mismos al pago de una cuota mensual.